- Saturday, 05 July 2025
Mars Volatiles and Climate Surveyor (MVACS)
NSSDCA ID: 1999-001A-01
Mission Name: Mars Polar LanderPrincipal Investigator:Prof. David A. Paige
Description
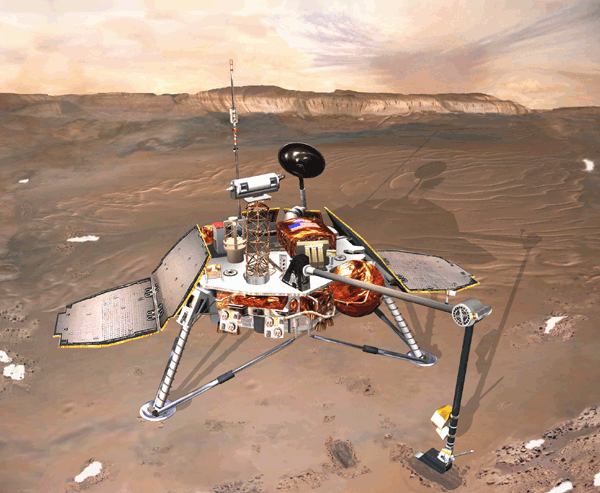
The Mars Volatiles and Climate Surveyor (MVACS) is an integrated scientific payload containing a Stereo Surface Imager, Robotic Arm and Robotic Arm Camera, Meteorology Package, and a Thermal and Evolved Gas Analyzer. The instruments are designed to study the distribution and behavior of water and other volatiles on Mars and their role in Mars' weather and climate history.
Stereo Surface Imager (SSI)
The stereo surface imager is a mast-mounted multi-spectral imager which will provide stereo panoramic images of the terrain around the Mars Polar Lander, close-up images of proximal rocks, dust, and other surface material, and support other instruments, particularly the Robotic Arm, the Thermal and Evolved Gas Analyzer, and the dust collecting magnets. The imager will also be used to estimate the column density of atmospheric dust, the optical depth of aerosols, and slant column abundances of water vapor using narrow-band imaging of the Sun. The imager is essentially identical to the Imager for Mars Pathfinder, a side-by-side charged-coupled device (CCD) stereo imager in a barrel-shaped housing which sits on top of an extendable mast. The mast stretches one meter above the lander, giving a total elevation of approximately two meters above the ground. Stereo imaging is made possible by focusing the dual optical lens systems onto a single detector. The camera has a 12-position color filter wheel covering wavelengths from 0.4 to 1.1 microns and onboard calibration targets. The optics do not require active focusing. The field of view for each eye is 14.4 degrees square and has a resolution of six-tenths of a millimeter near the lander. The CCD is a front-illuminated frame transfer array with 23 micrometer square pixels in two square 256 x 256 pixel frames. Each pixel has an instantaneous field of view of one milliradian. The stereoscopic system consists of 2 fold mirrors separated by 120 mm with the filter wheel in one path and a fold prism to place the images side-by-side on the CCD focal plane. The total mass of the instrument is 5.85 kg.
Robotic Arm (RA)
The robotic arm is a two meter long tube with an elbow joint near the center and an articulated scoop on the end. The arm is attached to the Mars Polar Lander on the "front" edge of the main deck, next to the SSI. The robotic arm has a small camera attached just above the scoop, an Elbow Temperature Sensor, part of the MET package, attached at the arm joint and a soil temperature probe mounted on the end of the arm. The robotic arm is designed to dig trenches, acquire samples of surface and subsurface material, support operation of the attached camera and temperature sensors, and provide samples for examination by the Thermal and Evolved Gas Analyzer. The arm is roughly as strong as a human arm. The scoop itself has teeth to aid in digging. The trench walls will be imaged for signs of layering and ice deposits, and to study the physical properties of the material. The arm will also be used to move the temperature sensor to allow temperature measurements at different locations. The Robotic Arm and attached camera have a total mass of 6.12 kg.
Robotic Arm Camera (RAC)
The robotic Arm Camera is attached just above the scoop on the Robotic Arm. It is designed to provide close-up images of the surface in the vicinity of the lander, assist Robotic Arm operations by imaging prospective surface samples in-situ and in the tip of the scoop, and obtain close-up images of the floor and side-walls of the trench dug by the robotic arm. The close-up images of the trench will be examined for fine-scale layering and texture, which may represent a geologic record of climatic events. The camera is a box-shaped device with a double Gauss lens and a CCD mounted to the arm so that it faces towards the scoop. Illumination of the target is provided by two lighting assemblies, a lower assembly containing 2 red, 2 green, and 4 blue lamps, and an upper assembly containing 4 lamps of each color illuminating a diffuser cavity.
Meteorology Package (MET)
The meteorology package consists of wind, temperature, pressure and humidity sensors mounted on masts and within the spacecraft. The primary objectives of this investigation are to characterize the weather, diurnal variations, carbon dioxide cycle, atmospheric saturation state, near-surface static stability, local dust raising capability, boundary layer structure, variations in near surface water, the history of volatile reservoirs and interaction between the atmosphere and other volatile reservoirs, and soil thermal properties to analyze conditions under which ground ice would be expected. Most of the instruments are mounted on a 1.2 meter mast extending upwards from the deck at the "back" of the lander, opposite the SSI and robotic arm. A 0.9 meter secondary mast is attached to the main mast and deploys downward to permit measurements near the surface. Wind speed and direction is measured by a nine-element hot wire array wind sensor mounted on the main mast and a two-element wind sensor mounted on the submast. Three fast thermocouple assembly temperature sensors are mounted at different heights on the main mast. Two temperature sensors are also located on the submast and one on the elbow joint of the robotic arm. A soil temperature probe on a 15 cm fiberglass tube is mounted on the back of the robotic arm scoop and can be pushed into the ground by the arm. A barocap atmospheric pressure sensor is located inside the Payload Electronics Box. A tunable diode 2.656 and 2.729 micron laser is mounted on the main mast to measure the abundance of atmospheric water and carbon dioxide and to measure the isotopic ratios carbon-13/carbon-12 and oxygen-18/oxygen-16 in atmospheric carbon dioxide, and deuterium/hydrogen and oxygen-18/oxygen-16 in atmospheric water. The total mass of the MET package is 1.79 kg.
Thermal and Evolved Gas Analyzer (TEGA)
The Thermal and Evolved Gas Analyzer is designed to measure the abundances of water ice, adsorbed carbon dioxide, oxygen, and water, and volatile-bearing minerals in surface and subsurface samples collected by the Robotic Arm. TEGA consists of a tunable diode laser spectrometer, an amperometric electrochemical cell, a differential scanning calorimeter, 8 sample ovens, and 8 reference ovens. A sample collected and imaged by the Robotic Arm is placed onto a grate over a sample oven. A cover is placed on top of the oven and the sample is heated at a controlled rate of a few degrees per minute to 1000 degrees C. Carbon dioxide, oxygen, and water vapor are driven off the sample as it is heated and measured by the Evolved Gas Analyzer, which consists of the spectrometer and electrochemical cell. At the same time, an empty reference oven is heated as a calibration for the Thermal Analyzer differential scanning calorimetry, in which the difference in energy required to heat the ovens indicates the concentrations of water ice and minerals containing water or carbon dioxide. Each oven can only be used once, so a total of 8 samples can be examined. The total mass of the TEGA instrument is 3.4 kg.
Alternate Names
- MVACS
- MarsPolarLander/MVACS
Facts in Brief
Mass: 20 kg
Funding Agency
- NASA-Office of Space Science Applications (United States)
Disciplines
- Planetary Science: Atmospheres
- Planetary Science: Geology and Geophysics
Additional Information
Questions and comments about this experiment can be directed to: Dr. David R. Williams
Personnel
| Name | Role | Original Affiliation | |
|---|---|---|---|
| Dr. Horst Uwe Keller | Co-Investigator | Max-Planck-Institut fur Aeronomie | keller@linmpi.mpg.de |
| Dr. Richard W. Zurek | Co-Investigator | NASA Jet Propulsion Laboratory | rzurek@mail1.jpl.nasa.gov |
| Dr. David Crisp | Co-Investigator | NASA Jet Propulsion Laboratory | dcrisp@mail3.jpl.nasa.gov |
| Dr. William V. Boynton | Co-Investigator | University of Arizona | wboynton@lpl.arizona.edu |
| Dr. Peter H. Smith | Co-Investigator | University of Arizona | psmith@lpl.arizona.edu |
| Dr. Eric M. Dejong | Co-Investigator | NASA Jet Propulsion Laboratory | |
| Dr. Laurie A. Leshin | Co-Investigator | Arizona State University | laurie.leshin@asu.edu |
| Mr. Randy D. May | Co-Investigator | NASA Jet Propulsion Laboratory | rmay@mailhost4.jpl.nasa.gov |
| Dr. Ari-Matti Harri | Co-Investigator | Finnish Meteorological Institute | ari-matti.harri@fmi.fi |
| Dr. Candice Hansen | Deputy Principal Investigator | NASA Jet Propulsion Laboratory | cjhansen@psi.edu |
| Prof. David A. Paige | Principal Investigator | University of California, Los Angeles | dap@thesun.ess.ucla.edu |
Selected References
- Smith, P. H., et al., The MVACS Surface Stereo Imager on Mars Polar Lander, J. Geophys. Res., 106, No. E8, 17589-17607, Aug. 2001.
- Keller, H. U., et al., The MVACS Robotic Arm Camera, J. Geophys. Res., 106, No. E8, 17609-17621, Aug. 2001.
- Bonitz, R., et al., Mars Volatiles and Climate Surveyor Robotic Arm, J. Geophys. Res., 106, No. E8, 17623-17634, Aug. 2001.