- Monday, 14 July 2025
Mars Reconnaissance Orbiter
NSSDCA/COSPAR ID: 2005-029A
Description
The Mars Reconnaissance Orbiter (MRO) is designed to orbit Mars over a full martian year and gather data with six scientific instruments, including a high-resolution imager. The science objectives of the mission are to: characterize the present climate of Mars and its physical mechanisms of seasonal and interannual climate change; determine the nature of complex layered terrain on Mars and identify water-related landforms; search for sites showing evidence of aqueous and/or hydrothermal activity; identify and characterize sites with the highest potential for landed science and sample return by future Mars missions; and return scientific data from Mars landed craft during a relay phase. MRO will return high resolution images, study surface composition, search for subsurface water, trace dust and water in the atmosphere, and monitor weather.
Spacecraft and Subsystems
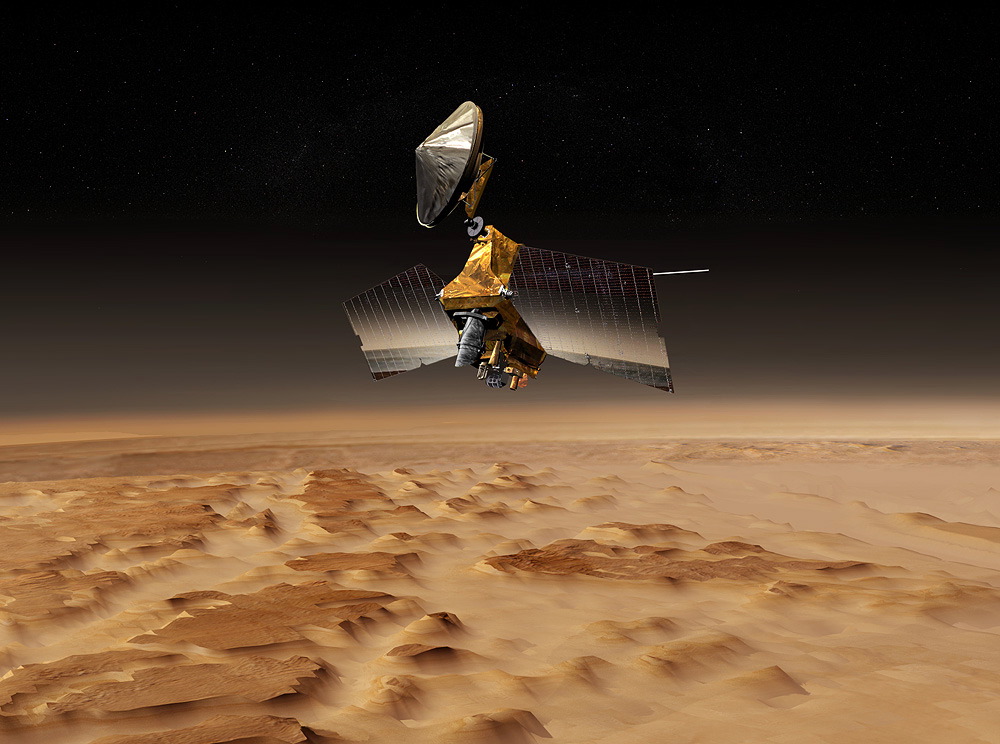
The Mars Reconnaissance Orbiter consists of a main bus, constructed of titanium, carbon composites, and aluminum honeycomb. Extending from the bus are two solar panel wings and a 3 meter high-gain antenna dish. The bus houses the propulsion system, telecommunications, command, guidance, and science instruments. The maximum spacecraft mass is 2180 kg, which includes 1149 kg of propellants.
Propulsion is provided by a total of 20 thrusters. Six 170 N (Newton) monopropellant (hydrazine) main-engine thrusters are used for the Mars Orbit insertion burn, a maneuver which will require about 70% of the total fuel onboard. Six 22 N thrusters are used for trajectory correction maneuvers and eight 0.9 N thrusters for pointing. All thrusters are fed from a single propellant tank mounted near the center of the main bus. A pressurant tank is used to force propellant to the motors. Spacecraft control is achieved with the use of reaction wheels and reaction control system thrusters. Navigation and attitude knowledge is determined by 16 sun sensors, two star tracker cameras, and two inertial measurement units, which use accelerometers and gyroscopes.
Two way telecommunications will be via X-band at about 8000 MHz, primarily through a 3 m diameter steerable high-gain dish antenna. Two low-gain Ka-band antennas, mounted on the high-gain dish, are also available for transmission and reception. Two transponders and three traveling wave tube amplifiers allow maximum data rates of 6 megabits/sec. Power is provided by the two solar cell arrays on wings mounted on opposite side of the bus. Each array has an area of 10 square meters and contains 3744 solar cells. The panels produce 1000 Watts at Mars which is used to run the equipment directly and also to charge two nickel-hydrogen 50 A-hr, 32-volt batteries. Thermal control is achieved by a combination of radiators, surface coatings, insulation, and heaters.
MRO's science payload includes the High Resolution Imaging Science Experiment (HiRISE), a visible stereo imaging camera; the Compact Reconnaissance Imaging Spectrometer for Mars (CRISM), a visible/near-infrared spectrometer to study the surface composition; the Mars Climate Sounder (MCS), an infrared radiometer to study the atmosphere, a shallow subsurface sounding radar (SHARAD) provided by the Italian Space Agency to search for underground water; the Context Camera (CTX), to provide wide-area views; and the Mars Color Imager (MARCI), to monitor clouds and dust storms. In addition, there are three engineering instruments aboard MRO: the Electra UHF communications and navigation package, which will be used as a relay between the Earth and future Mars missions; the optical navigation camera, which will be tested for possible navigational use on future planetary spacecraft; and the Ka-band telecommunications experiment package, which will be testing high performance Ka-band communications. Engineering accelerometer data will be used to study the structure of the martian atmosphere and tracking of the orbiter will be used to study the gravity field of Mars.
Mission Profile
Launch on an Atlas V-401 took place at 11:43 UT (7:43 a.m. EDT) on 12 August 2005 from Kennedy Space Center. The cruise to Mars took seven months and included checkouts, calibrations, navigation, and five trajectory correction maneuvers. On 10 March 2006 MRO reached Mars and perform a Mars orbit insertion maneuver, passing under the southern hemisphere of Mars and firing its main engines for about 27 minutes. Signals that the burn has started reached Earth at 21:24 UT (4:24 p.m. EST) on 10 March. With 6 minutes left in the burn MRO passed behind Mars as seen from Earth. Radio communication resumed when it re-emerged about 30 minutes later.
Mars Reconnaissance Orbiter reached Mars and went into orbit on 10 March 2006. The signal that the orbit insertion burn started reached Earth at 21:24 UT (4:24 p.m. EST). The first signals following its reappearance reached Earth at about 22:16 UT (5:16 EST). The 1641 second burn slowed the spacecraft by about one km/sec, leaving it in a 400 x 35000 km polar capture orbit with a 35 hour period. Aerobraking was used over the next six months to lower the orbit to the 255 x 320 km science orbit (with periapsis over the south pole and apoapsis over the north pole). There are twelve sun-synchronous orbits per day so that the orbiter will always see the ground at 3:00 p.m. local time at the equator. Science operations began at the end of solar conjunction in November 2006, and, with multiple extensions to the mission, continue to the present (as of September, 2015). Total cost of the mission is estimated at about $720 million.
Alternate Names
- MRO
- MarsReconnaissanceOrbiter
- urn:nasa:pds:context:instrument_host:spacecraft.mro
- 28788
Facts in Brief
Launch Date: 2005-08-12
Launch Vehicle: Atlas V 401
Launch Site: Cape Canaveral, United States
Mass: 1031 kg
Nominal Power: 1000 W
Funding Agency
- National Aeronautics and Space Administration (United States)
Discipline
- Planetary Science
Additional Information
- Launch/Orbital information for Mars Reconnaissance Orbiter
- Telecommunications information for Mars Reconnaissance Orbiter
Questions and comments about this spacecraft can be directed to: Dr. David R. Williams
Personnel
| Name | Role | Original Affiliation | |
|---|---|---|---|
| Dr. R. Stephen Saunders | Program Scientist | NASA Headquarters | |
| Mr. James E. Graf | Project Manager | NASA Jet Propulsion Laboratory | jegraf@mailhost4.jpl.nasa.gov |
| Dr. Richard W. Zurek | Project Scientist | NASA Jet Propulsion Laboratory | rzurek@mail1.jpl.nasa.gov |
Selected References
- Graf, J. E., et al., The Mars Reconnaissance Orbiter Mission, Acta Astronaut., 57, No. 2-8, 566-578, 2005.
- Zurek, R. W., and S. E. Smrekar, An overview of the Mars Reconnaissance Orbiter (MRO) science mission, J. Geophys. Res., 112, E05S01, doi:10.1029/2006JE002701, 2007.
- Taylor, J., et al., Chapter 6: Mars Reconnaissance Orbiter, in Deep Space Communications, J. Taylor Ed., Vol. 13, pp. 201-262, Deep Space Communications and Navigation Series, JPL, Calif. Inst. Technol., Deep Sp. Comm. and Nav. Sys. (DESCANSO), Pasadena, CA, Oct. 2014.
![[First MRO HiRise image of Mars]](http://nssdc.gsfc.nasa.gov/planetary/image/mro_hirise_full_1.jpg)
The first image of Mars taken by the HiRISE Camera on MRO.
The image was taken from an altitude of 2489 km on 24 March 2006. Spacecraft set to reach milestone, reports technical glitches - 7 February 2007
NASA press release on MRO reaching Mars - 10 March 2006
NASA press release on launch of MRO - 12 August 2005
NASA press release on upcoming August launch of MRO - 21 July 2005
NASA press release on selection of MRO instruments - 11 November 2001
Mars Reconnaissance Orbiter Home Page - NASA JPL
2001 Mars Odyssey
Mars Global Surveyor
Mars Home Page
Mars Fact Sheet