- Monday, 30 June 2025
Mars Surveyor 2001 Rover
NSSDCA ID: MS2001R
Description
This mission has been cancelled as part of the review and restructuring of NASA's Mars Exploration Program.
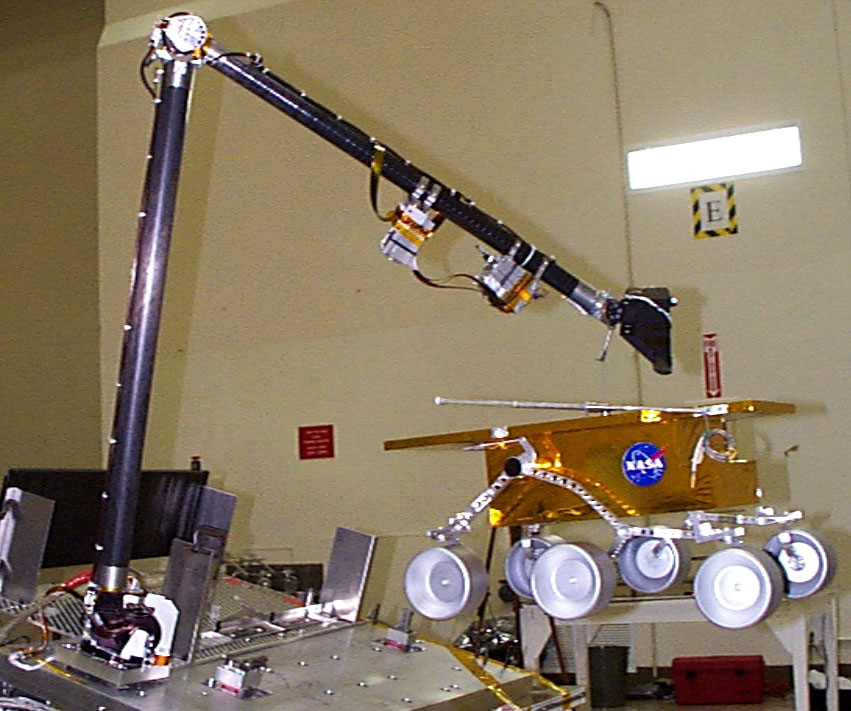
The Mars Surveyor 2001 Lander will carry a near-duplicate of the Mars Pathfinder "Sojourner" rover called the "Marie Curie". It carries an Alpha-Proton X-ray Spectrometer (APXS), stereo black and white front cameras and a mono black and white rear camera. The APXS, a duplicate of the one used on Mars Pathfinder with minor modifications, is mounted on the back of the rover and will be used to study the composition of rocks and soils. The rear camera is for close-up imaging of the APXS targets and terrain imaging. The front cameras are also for terrain imaging as well as hazard detection.
The rover is a six-wheeled vehicle, 28 cm high, 63 cm long, and 48 cm wide with a ground clearance of 13 cm, mounted on a "rocker-bogie" suspension. It has a mass 13.81 kg. It has 6 wheels, each with its own drive motor. Four of the wheels are steerable. The wheels are 13 cm in diameter and 8 cm wide. Electronics and batteries are stored in an insulated warm electronics box which is heated by 3 RHU's. Additional electronic heating is maintained during daytime. Power is provided by 0.2 square meters of GaAr/Ge solar cells mounted on the flat top of the rover. Maximum power is 16 W at noon, greater than 10 W will be produced for 6 hrs each sol. Non-rechargeable lithium thionyl
chloride (LiSOCl2) D-cell batteries provide backup. Communications are via UHF antenna and 9600 baud modem with the lander. The modem gives line-of-sight communication up to 500 m and an effective data transfer rate of 2 Kbps. On-board computing uses a single Intel 80C85 2 MHz CPU with 100 KIPs, 64 kB RAM main memory and 512 kB RAM temporary data storage.
After landing, the rover will be unstowed from the lander and deployed by the lander robotic arm. The rover is controlled by commands sent from the ground to the lander and on to the rover. Ground controllers use images returned by the lander panoramic camera and rover cameras to determine the route commands to uplink. The rover uses wheel odometers to determine distance travelled. On-board hazard avoidance equipment includes accelerometers to determine tilt angle, laser stripers, and contact sensors. The rover also has a "waypoint" driving capability, in which coordinates of a destination can be sent to the rover and it will use its on-board navigation system to avoid obstacles and travel to the target. The top speed of the rover is 0.6 cm/sec. It is planned that the rover will traverse over 100 m during the mission, up to 10 m from the lander. The rover will only be active during the day and go into a hibernation stage at night.
Alternate Names
- Marie Curie
- MarsSurveyor2001Rover
Facts in Brief
Launch Date: 2001-04-05
Launch Vehicle: Delta II 7425
Launch Site: Cape Canaveral, United States
Mass: 10.5 kg
Funding Agency
- National Aeronautics and Space Administration (United States)
Discipline
- Planetary Science
Additional Information
- Launch/Orbital information for Mars Surveyor 2001 Rover
- Telecommunications information for Mars Surveyor 2001 Rover
Questions and comments about this spacecraft can be directed to: Dr. David R. Williams
Personnel
| Name | Role | Original Affiliation |
|---|
Mars Surveyor 2001 Lander Information
Mars 2001 Odyssey Information
Mars Home Page
Mars Fact Sheet
Mars Global Surveyor Information