- Wednesday, 09 July 2025
Mars 3 Lander
NSSDCA/COSPAR ID: 1971-049F
Description
The Mars 2 and Mars 3 missions consisted of identical spacecraft, each with a bus/orbiter module and an attached descent/lander module. The primary scientific objective of the Mars 3 descent module was to perform a soft landing on Mars, return images from the surface, and return data on meteorological conditions, atmospheric composition, and mechanical and chemical properties of the soil. Mars 3 was the first spacecraft to make a successful soft landing on Mars.
Spacecraft and Subsystems
The Mars 3 descent module was mounted on the bus/orbiter opposite the propulsion system. It consisted of a spherical 1.2 m diameter landing capsule, a 2.9 m diameter conical aerodynamic braking shield, a parachute system and retro-rockets. The entire descent module had a fueled mass of 1210 kg, the spherical landing capsule accounted for 358 kg of this. An automatic control system consisting of gas micro-engines and pressurized nitrogen containers provided attitude control. Four "gunpowder" engines were mounted to the outer edge of the cone to control pitch and yaw. The main and auxiliary parachutes, the engine to initiate the landing, and the radar altimeter were mounted on the top section of the lander. Foam was used to absorb shock within the descent module. The landing capsule had four triangular petals which would open after landing, righting the spacecraft and exposing the instrumentation.
The lander was equipped with two television cameras with a 360 degree view of the surface as well as a mass spectrometer to study atmospheric composition; temperature, pressure, and wind sensors; and devices to measure mechanical and chemical properties of the surface, including a mechanical scoop to search for organic materials and signs of life. It also contained a pennant with the Soviet coat of arms. Four aerials protruded from the top of the sphere to provide communications with the orbiter via an onboard radio system. The equipment was powered by batteries which were charged by the orbiter prior to separation. Temperature control was maintained through thermal insulation and a system of radiators. The landing capsule was sterilized before launch to prevent contamination of the martian environment.
Prop-M Rover
The Mars 2 and 3 landers carried a small (21.5 x 16 x 6 cm) walking robot called PROP-M. The robot had a mass of 4.5 kg and was tethered to the lander by a cable for direct communication. The rover was designed to "walk" on a pair of skis to the limit of the 15 m cable length. The rover carried a dynamic penetrometer and a radiation densitometer. The main PROP-M frame was a squat box with a protrusion at the center. The frame was supported on two wide flat skis, one extending down from each side elevating the frame slightly above the surface. At the front of the box were obstacle detection bars. The rover was planned to be placed on the surface by a manipulator arm and to move in the field of view of the television cameras. It could move by alternately moving the skis, and turn by "walking" the two skis in opposite directions, stopping to make measurements every 1.5 meters. The traces of movement in the martian soil would also be recorded to determine material properties. Unfortunately the failure of the mission resulted in the robot never being deployed.
Mission Profile
The descent module was separated from the orbiter on 2 December 1971 at 09:14 UT. (There is an uncertainty in the absolute times stated here of about 3 minutes.) Fifteen minutes later the descent engine was fired to point the aeroshield forward. At 13:47 UT the module entered the martian atmosphere at 5.7 km/sec at an angle less than 10 degrees. The braking parachute was then deployed, followed by the main chute which was reefed until the craft dropped below supersonic velocity, at which time it was fully deployed, the heat shield was ejected, and the radar altimeter was turned on. At an altitude of 20 to 30 meters at a velocity of 60 - 110 m/s the main parachute was disconnected and a small rocket propelled it off to the side. Simultaneously the lander retrorockets were fired. The entire atmospheric entry sequence took a little over 3 minutes.
Mars 3 impacted the surface at a reported 20.7 m/s at approximately 45 degrees S, 158 degrees W, at 13:50:35 UT. Shock absorbers inside the capsule were designed to prevent damage to the instruments. The four petal shaped covers opened and the capsule began transmitting to the Mars 3 orbiter at 13:52:05 UT, 90 seconds after landing. After 20 seconds, at 13:52:25, transmission stopped for unknown reasons and no further signals were received at Earth from the martian surface. It is not known whether the fault originated with the lander or the communications relay on the orbiter. A partial panoramic image returned showed no detail and a very low illumination of 50 lux. The cause of the failure may have been related to the extremely powerful martian dust storm taking place at the time which may have induced a coronal discharge, damaging the communications system. The dust storm would also explain the poor image lighting.
Alternate Names
- Mars3Lander
Facts in Brief
Launch Date: 1971-05-28
Launch Vehicle: Proton Booster Plus Upper Stage and Escape Stages
Launch Site: Tyuratam (Baikonur Cosmodrome), U.S.S.R
Mass: 358 kg
Funding Agency
- Unknown (U.S.S.R)
Discipline
- Planetary Science
Additional Information
Questions and comments about this spacecraft can be directed to: Dr. David R. Williams
Personnel
| Name | Role | Original Affiliation |
|---|
Selected References
- Soviets land TV on Mars - blame failure on wind, dust, Aviat. Week Space Technol., 95, No. 24, 20, Dec. 1971.
- Harvey, B., The new Russian space programme from competition to collaboration, John Wiley and Sons, Chichester, England, 1996.
- Johnson, N. L., Handbook of soviet lunar and planetary exploration - volume 47 science and technology series, Amer. Astronau. Soc. Publ., 1979.
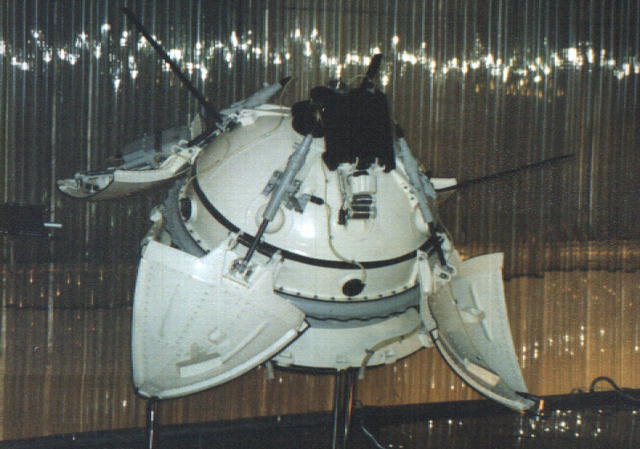
![[Mars 3 Lander]](http://nssdc.gsfc.nasa.gov/image/spacecraft/mars3_lander2_vsm.jpg)
This image shows a cut-away view of the Mars 3 Lander at the NPO Lavochkin Museum.
The image at the top of the page shows a Mars 3 Lander model at the
Memorial Museum of Cosmonautics in Russia
Images courtesy of Alexander Chernov and the
Virtual Space Museum
![[Mars 3 Rover]](http://nssdc.gsfc.nasa.gov/planetary/image/mars_propm_rover.jpg)
Image of the Mars Prop-M Rover
![[Mars 2/3 Lander Diagram]](http://nssdc.gsfc.nasa.gov/planetary/image/mars_2_3_lander_diagram.jpg)
![[Mars 2/3 Lander]](http://nssdc.gsfc.nasa.gov/planetary/image/mars_2_3_lander.jpg)
Images above from The Difficult Road to Mars, Perminov, 1999
Chronology of Mars ExplorationThe Difficult Road to Mars - Online Book, Perminov, 1999 (PDF file)
Mars Page